
ONR Historical Timeline 1960-1970
-
First U.S. Intelligence Satellite
Image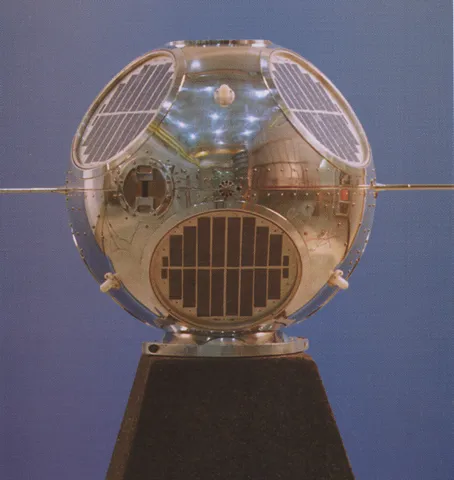
1960
NRL’s Galactic Radiation and Background (GRAB) 1 satellite was the first operational U.S. intelligence satellite. It was launched in 1960, only 52 days after a U-2 was lost on a mission over Soviet territory. When GRAB I began sending space-intercepted electronic intelligence signals back to Earth, it proved that a space craft could collect as much information as all sea-, air- and land-based reconnaissance platforms within the satellite's field of view; but it could do so at a fraction of the cost and with no personnel risk.
-
Bathyscaphe Trieste
Image
1960
Trieste is a Swiss-designed, U.S. Navy-owned, deep-diving research bathyscaphe. In 1960, two men set a deep-diving record, plunging the Trieste 35,810 feet to the deepest known point on the Earth’s surface, the Challenger Deep in the Pacific Ocean's Mariana Trench. The Trieste became the first manned vessel to reach the floor of the Challenger Deep.
-
SOSUS
Image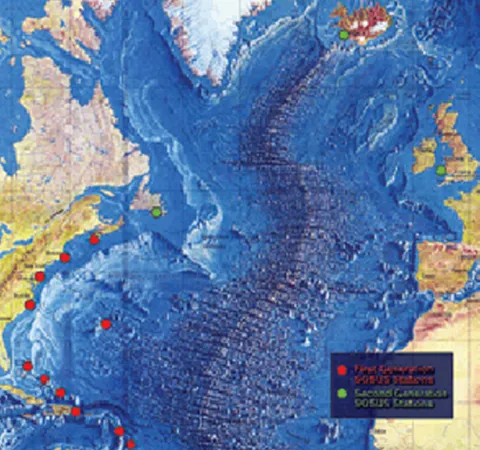
1961
The Sound Surveillance System, or SOSUS, provided a deep-water, long-range detection capability. It consisted of high-gain, long fixed arrays in deep ocean basins. A key long-range early-warning asset for protecting the United States against the threat of Soviet ballistic missile submarines, SOSUS also provides vital cueing information for tactical, deep-ocean anti-submarine warfare. ONR was involved in the earliest planning of the project in 1950 with the Hartwell Committee, and also contracted with Western Electric later that same year to begin the initial research and development phase of SOSUS. The system was operational by 1961.
-
Stratoscope II
Image
May 1961
Funded by ONR, the unmanned Stratoscope II telescope operated above 98 percent of the air and water "blanket" that surrounds the Earth, so data was obtained free of the atmosphere's absorptive effects. Launched by a balloon filled with 350,000 cubic feet of helium, the telescope collected new and vital data on Jupiter and the giant red stars. The manned Strato-Lab, meant to provide biomedical data on humans at high altitudes for the space program, achieved an altitude record of more than 113,000 feet in May 1961.
-
Aqueous Film Forming Film (AFF)
Image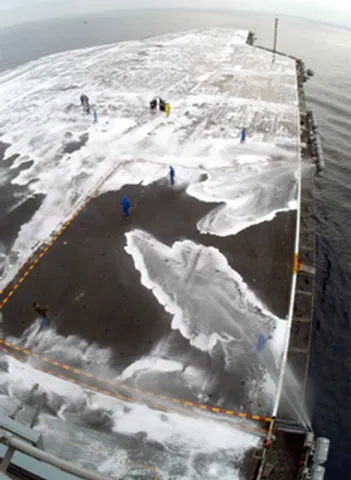
AFF rapidly extinguishes hydrocarbon fuel fires and forms an aqueous film on the fuel surface to prevent evaporation and reignition. The film also has a unique self-healing capability whereby scars in the aqueous film layer caused by falling debris or firefighting activities are rapidly resealed. AFF is now used on all naval aircraft carriers and by major airports, refineries and other areas where potentially catastrophic fuel fires can occur.
-
RP FLIP
Image
Research Platform FLIP, the Floating Instrument Platform, is a 355-foot-long, spoon-shaped buoy that can be flipped from a horizontal to a vertical position by pumping 700 tons of seawater into the "handle" end while flooding air into the "cradle," causing it to rise up out of the sea. For nearly six decades it has been used for researching wave height, acoustic and electromagnetic signal propagation, water temperature and density, and for collecting meteorological data.
-
SEALAB
Image
Developed by the Department of the Navy during the 1960s, SEALAB I, II and III were experimental underwater habitats that proved humans could exist underwater for extended periods of time. This led to research that enhanced the productivity of personnel as they go about tasks, such as engaging in deep-sea diving and rescue, studying marine life in its natural environment and collecting geological and oceanographic data.
-
Shakey the Robot
Image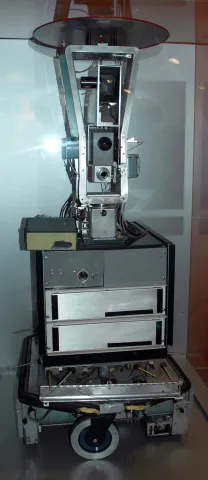
1969
In 1969, a mobile robot ancestor with TV eyes, tactile sensors, optical range finder and an elementary navigation system connected to a large computer, Shakey was the first robot to perform autonomously. The Stanford Research Institute created Shakey with ONR funding. The robot could plan and execute simple tasks, such as finding objects and manipulating them in the laboratory, while avoiding obstacles.